The Target Reached bit (SRH.9) is set when the target position (the position reference generated by the internal reference generator) arrives at the position to reach (i.e. at the commanded position).
The Motion is Completed bit (SRL.10) is set when the motion complete
condition is met.
The motion complete condition can be configured during the setup phase through the "Advanced Tuning - Position controller | Test" tab in the "Tune & Test" dialogue. It has the following 2 options:
- motion
complete inside a settle band
- motion complete when target (reference) is reached

Remark: By default, the motion complete condition is set to "motion complete inside a settle band" (when the actual position remains inside a settle band).
When the motion complete condition is set to "motion complete inside a settle band", after the Target Reached condition is met, the
drive checks the actual position value and compares it with the reference (in other words it checks the position error evolution in time). When the position error remains
inside the imposed settle band for the imposed time, the motion completes and the bit 10 in the SRL register is set. This means that Target Reached bit will
be set first, and only after a time, the Motion is Completed bit will also
be set. This time depends on the settle band parameters and on the tuning.
Remark: If the tuning is too relaxed or if the
motion complete settle band is set too tight, the motion complete condition
may never occur. In case the TML program waits for this condition, it may get stuck waiting for it.

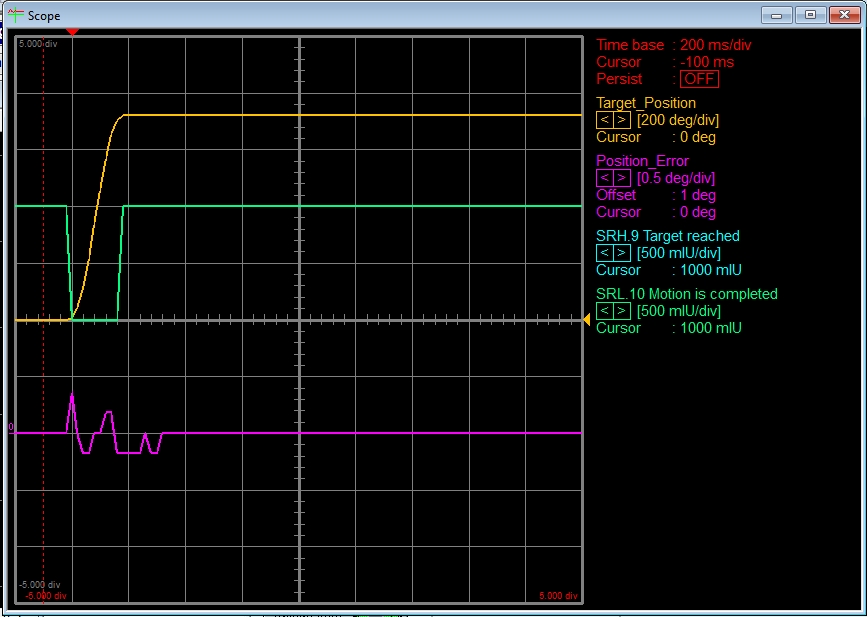
The above graph shows the Target Reached and the Motion is Completed bits when the motion complete condition is set to "motion complete inside a settle band" and the drive is set to perform a trapezoidal position profile of 2 rotations. The position error in the graphic is a good indicator of the moment when the actual position enters in the imposed band. As it can be seen, the Target Reached bit is set once the reference achieves the position to reach. The Motion is Completed bit is set only after the actual position remains inside the set band (0.5 rot) for the set time (1 ms).
When the motion completed condition is set to "motion complete when target (reference) is reached", the Motion is Completed and the Target Reached bits will be set in the same time. This behaviour is illustrated in the graph below.
In this case the position error is ignored. That's why this condition is preferred during the manual tuning procedure.
If the case, the motion complete condition can also
be changed on the fly (during the TML program execution), using
the "Event" dialogue.

 Categories
Categories 