| |
| |
Exit from limit switch [GB]
| Author: AM Reference Number: AA-00244 Views: 7088 Created: 09-09-2011 17:04 Last Updated: 23-08-2021 12:30 |
0 Rating/ Voters
|
 |
There are 2 conditions which must be fulfill in order to exit the limit switch:
- the motor must standstill (bit 10 - "Motion is completed" in the SRL register is set), after the limit switch is hit;
- the motion profile to exit from the limit switch must be programmed with the "TUM1" option (generate the new trajectory starting from the actual value of position and speed reference). 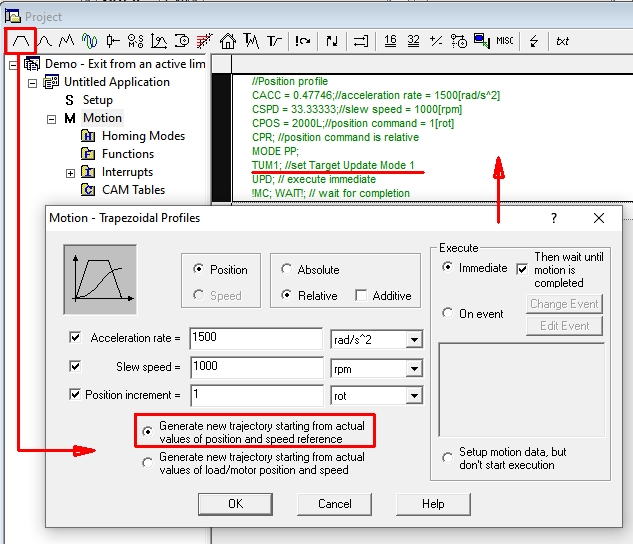
Remarks:
1) When "TUM0" (generate the new trajectory starting from the actual values of load/motor position and speed) is active, the drive will use the actual speed of the motor to compute the new reference. The motor speed, even in standstill, can vary between -1IU to +1IU. Because of this variation the drive may consider that the motor is still moving against the limit switch and stop it.
2) "TUM1" option will configure the drive to use the speed reference, which in case of a standstill motor is zero. Hence, with "TUM1" the profile will start from known conditions and the motor will move in the correct direction.
3) For configurations with stepper motors controlled in open loop the TUM0 and TUM1 options have no meaning. The P100.LimitSwitchExample project, attached to this article can be used as a starting point to create TML application that handle the case when the motor exits a limit switch.
The project archive (P100.LimitSwitchExample.m.zip) can be restored using Project | Restore menu command from EasyMotion Studio.
|
|
|
|
 Categories
Categories 